
算法图解
1.简介
二分查找
-
最多查找 $\log_{2}n$ 次
-
时间复杂度:$O(\log n)$
-
有序
1 | def binary_search(list, item): |
旅行商问题
有一位旅行者需要前往 n 个城市,同时确保旅程最短(计算每种顺序及其总旅程)
$ O(n!) $
2.选择排序
需要将数据存储到内存时,我需要请求将数据提供存储地址,计算机会给我一个存储地址,我再把数据放里面
数组
-
需要连续的存储空间,如果不满足,无法添加数据,则复制(移动)到另一个满足的连续空间
-
解决方法:预留空间,会浪费内存
-
支持随机访问和顺序访问
链表
-
每个元素都存储下一个元素的地址
-
修改和删除简单,只需修改一两个元素指向的地址
-
缺点:最后一个元素不能直接读取
-
只能顺序访问(从第一个元素开始逐个读取元素)
选择排序
-
选择单一指标进行排序
-
每次遍历一遍 选一个出来
-
时间复杂度:$ O(n^2) $
1 | def findSmallest(arr: List[int]) ->int: |
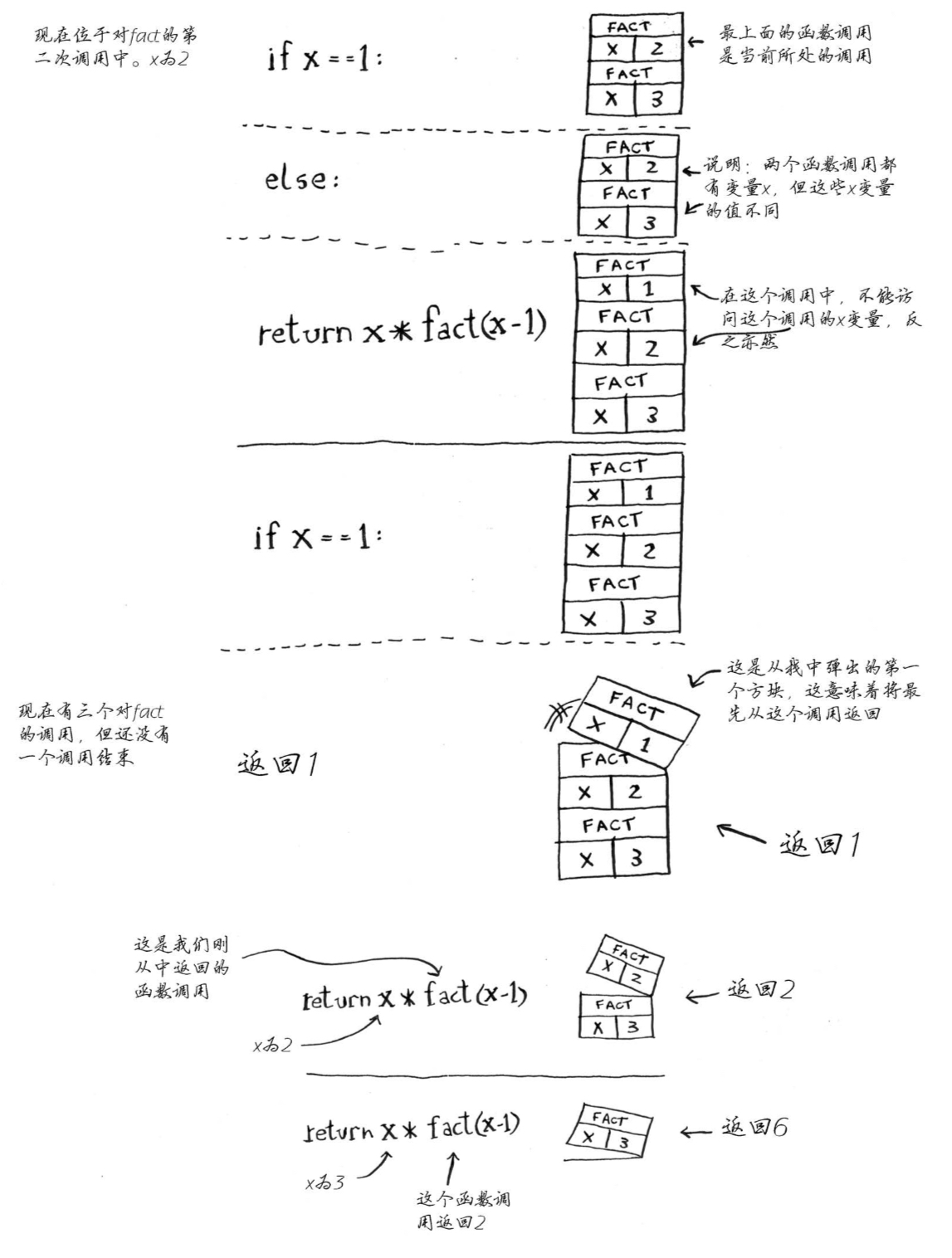
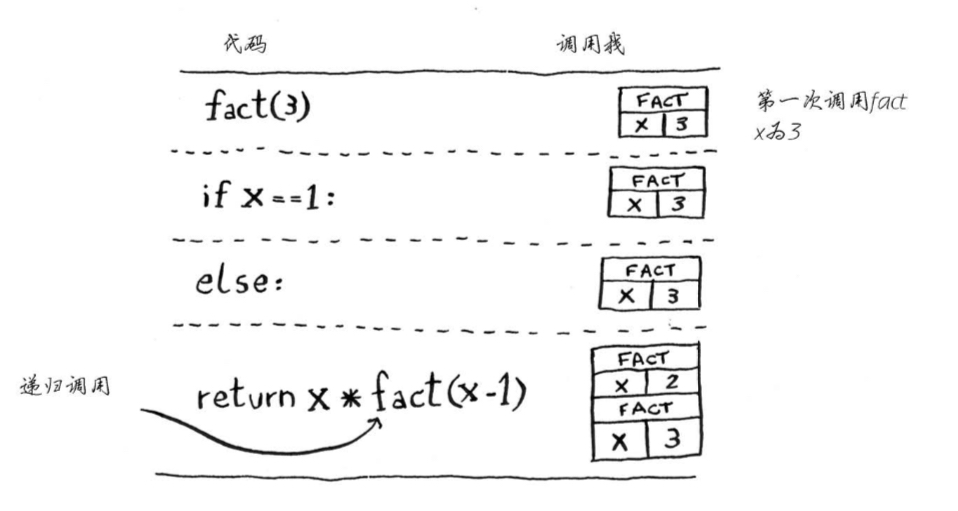
3.递归
请手写递归逻辑
编写递归函数,必须注意何时停止递归
-
递归条件:函数调用自己
-
基线条件:函数不再调用自己
栈
-
操作
-
压入
-
弹出
-
-
调用栈(call stack)
-
函数与栈
-
函数就是栈
-
哪个函数在栈顶就执行哪个函数
-
调用另一个函数时,当前函数暂停并处于未完成状态
-
调用函数——压栈
-
return——出栈

-
快速排序
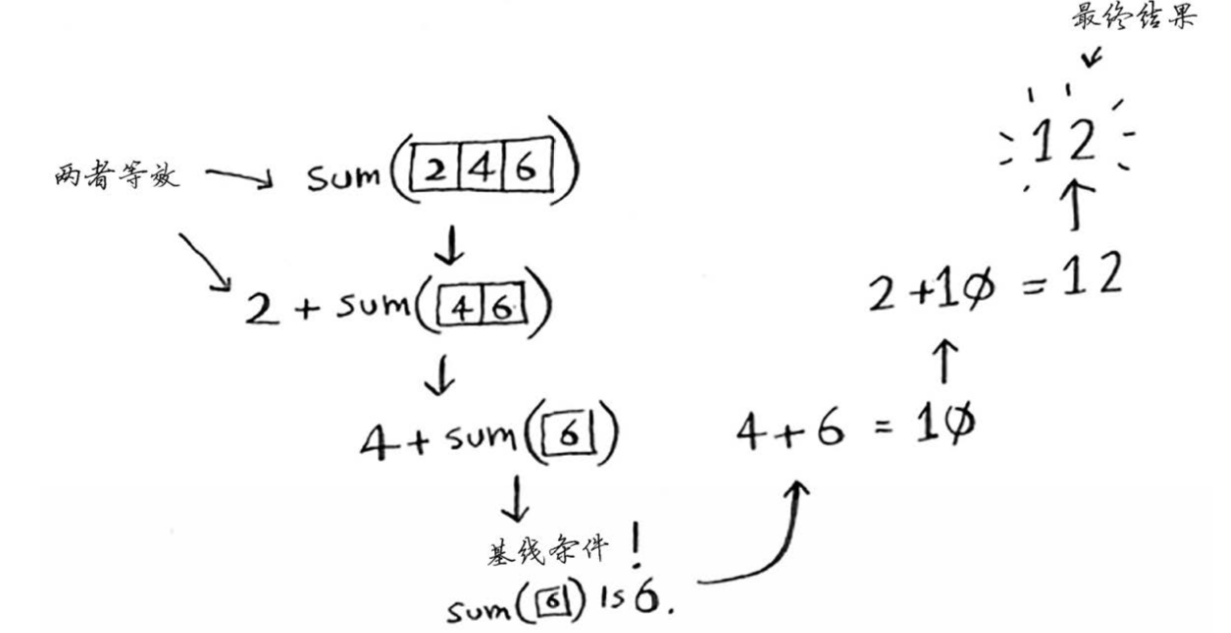
分而治之(divide and conquer, D&C)
-
步骤
- 找出基线条件
- 不断将问题分解(缩小规模),直到符合基线条件
-
例子:sum函数
1
2
3
4
5
6def sum_arr(arr):
if not arr:
return 0
else:
number = arr.pop()
return number + sum_arr(arr) -
提示:涉及数组的递归函数,基线条件一般是数组为空或只有一个元素
-
提示:python数组是可变的,传进函数的是数组本身
快速排序
- 基线条件:数组为空或只包含一个元素
- 复杂度:O(nlogn)
- 首先选择一个元素——基准值
- 接着分区
- 一个小于基准值的子数组
- 基准值
- 一个大于基准值的子数组
- 对这两个子数组基进行快速排序
1 | def quicksort(array): |
4.散列表
散列函数
复杂度:$ O(1)$
条件:
- 必须是一致的,输入和输出一一对应
- 将不同的输入映射到不同的数字
- 灵活运用索引
- 只返回有效索引
python:字典
1 | book = dict() |
散列表由键和值组成
散列表的应用
- 电话簿
- 网站地址转IP地址
- 缓存
1 | cache ={} |
- 防止重复
1 | # 创建已投票字典 |
冲突
给两个键分配的位置相同
- 散列函数很重要
- 如果散列表存储的链表很长,散列表的速度将急剧下降
性能
- 较低的填装因子
- 良好的散列函数
填装因子:散列表包含的元素数/位置总数
一旦填装因子大于0.7,可以调整列表长度
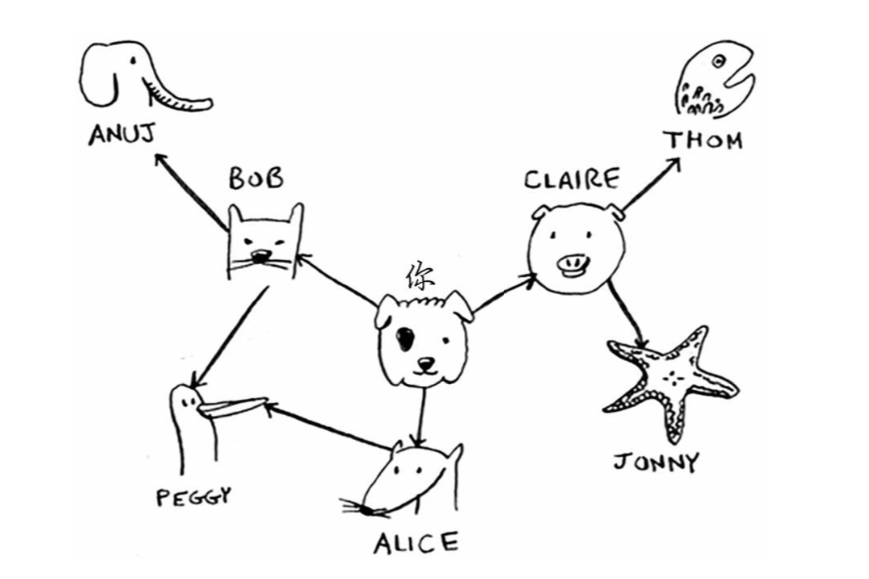
5.广度优先搜索
breadth-first search, BFS
效果:找到两样东西之间的最短距离
最短路径问题(shortest-path problem)
- 我去北京天安门,需要几个步骤
- 打车到广州南站
- 高铁从广州南站到北京
- 打车到北京天安门
- 使用图来建立问题模型
- 使用广度优先搜索解决问题
图
图模拟一组连接
图由**节点(node)和边(edge)**组成
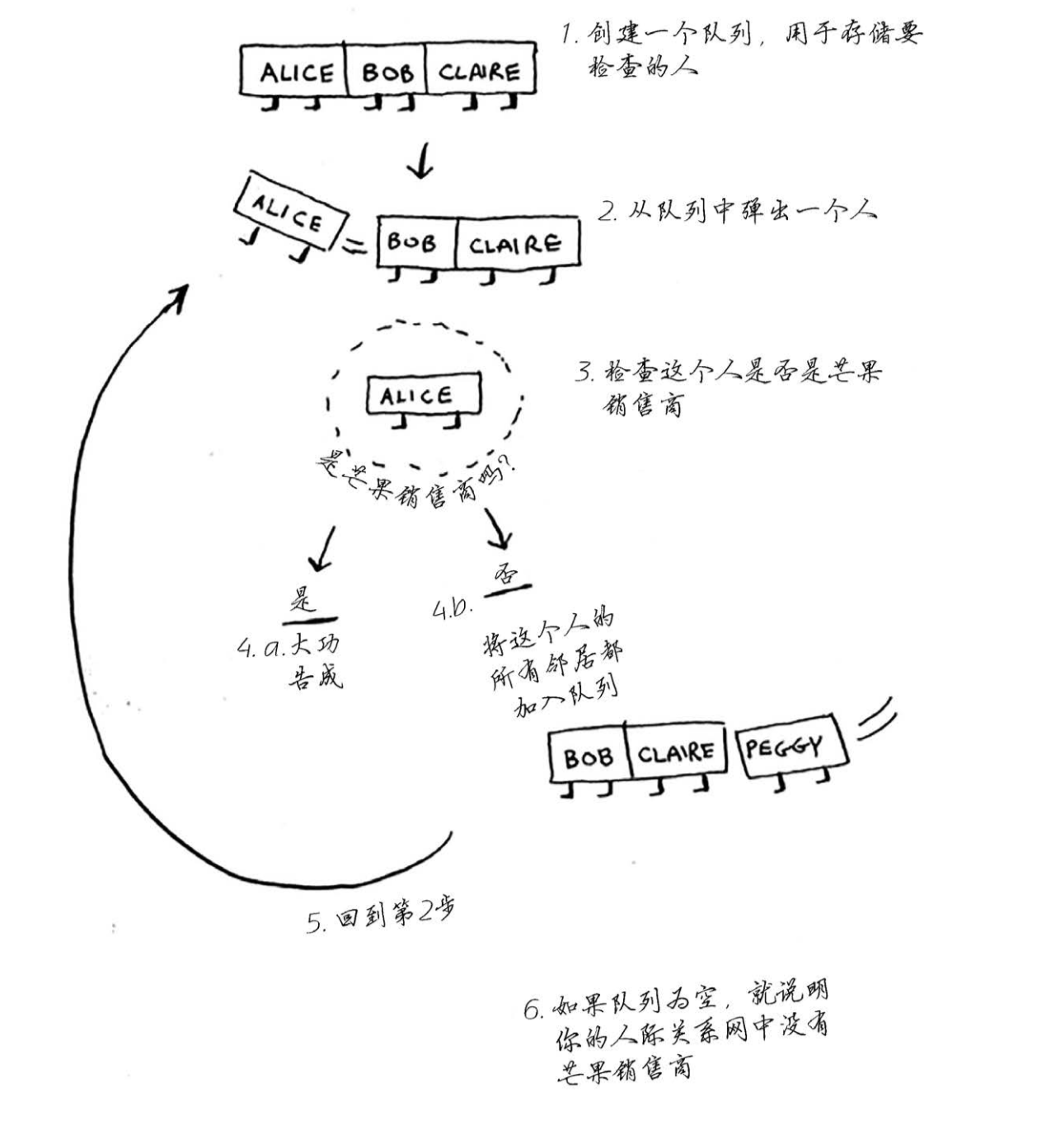
广度优先搜索
解决问题:
- 从节点A出发,有前往节点B的路径吗?
- 从节点A出发,前往节点B的哪条路经最短?
队列
先进先出(First In First Out, FIFO)
操作:
- 入队
- 出队
1 | graph = {} |
键-值对的添加顺序不重要,散列表是无序的
🔥实现算法
1 | from collections import deque |
运行时间
O(V + E) V是顶点数,E为边数
拓扑排序是针对有向无环图(DAG,Directed Acyclic Graph)的一种排序算法,它将图中的所有顶点排成一个线性序列(有序序列),使得对于任何一条有向边U→V,顶点U都在顶点V之前
树是特殊的图,其中没有往后指的边
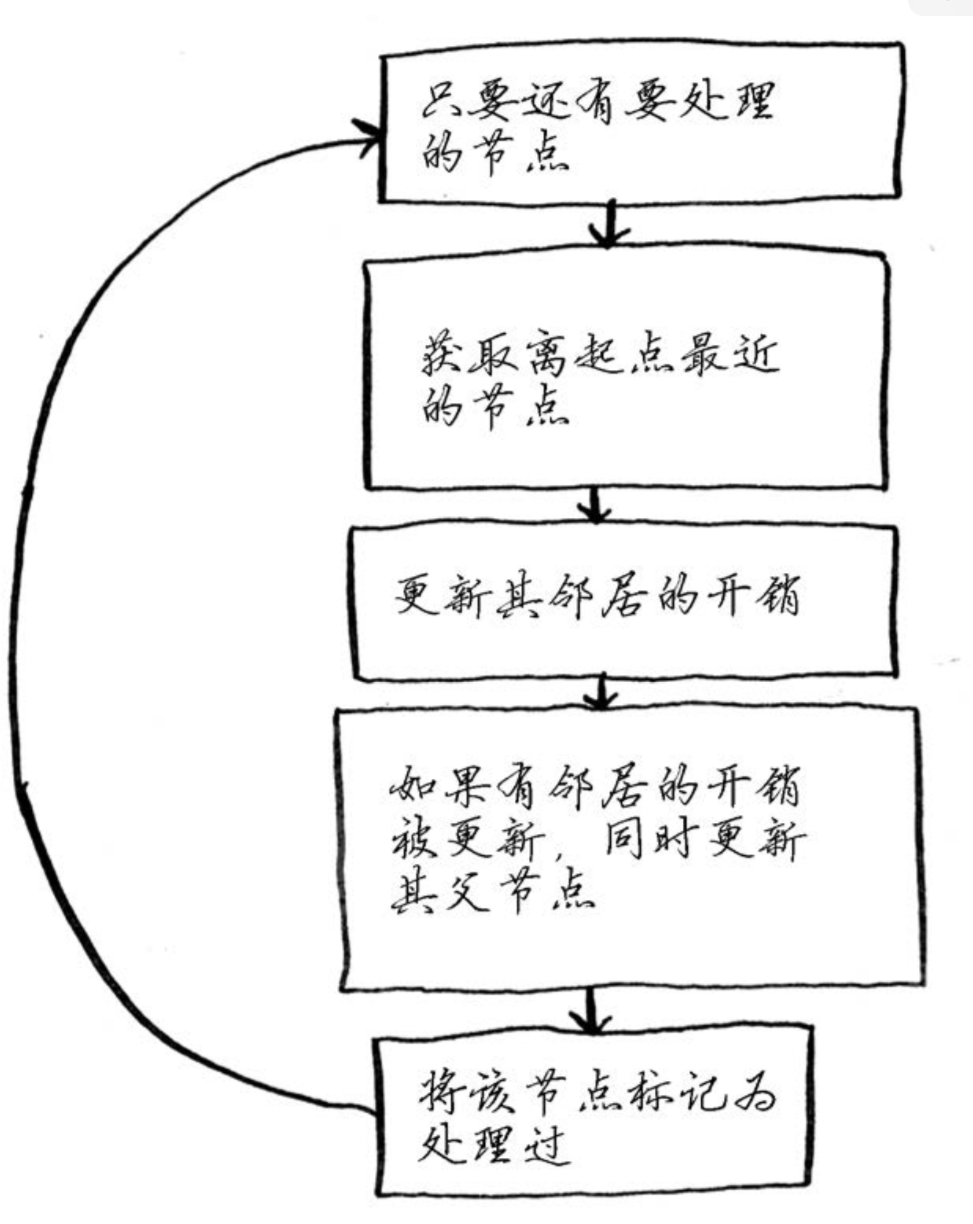
6.迪克斯特拉算法
广度优先搜索 找出段数最少的路径
迪克斯特拉算法 找出最快、总权重最小的路径
- 找出最小的节点(本轮权重最小的节点)
- 更新该节点的邻居的开销
- 重复🔁该过程,直到遍历完所有节点
- 计算最终路径
术语
- 权重(weight)
- 加权图(weighted graph)
- 非加权图(unweighted graph)
- 环(loop)
负权边
如果有负权边,就不能使用迪克斯特拉算法
可以使用贝尔曼-福德算法(Bellman-Ford algorithm)
实现
需要三个散列表
- 一个散列表存储邻居和前往邻居的开销(邻居的散列表包含开销的散列表)
- 一个散列表存储每个节点的开销(从起点开始计算🧮),终点默认为无穷大
- 一个散列表存储父节点,默认为没有None
1 | # 更新最小的节点 |
练习
1 | graph = {} |
7.贪婪算法
每步都选择局部最优解,最终得到的就是全局最优解
背包问题🎒
集合覆盖问题
- 近似算法(approximation algorithm)
- 选出一个覆盖了最多的未覆盖州的广播台
- 重复直到覆盖掉所有州
1 | provinces_needed = set(["京","津","冀","沪","黑","琼","粤"]) |
NP完全问题
需要计算所有的解,并从中选出最小/最短的
阶乘函数(factorial function)
NP完全问题的特征
- 涉及所有组合的
- 必须考虑各种可能的情况
- 涉及序列且难以解决
- 涉及集合且难以解决
- 可转换为旅行商问题
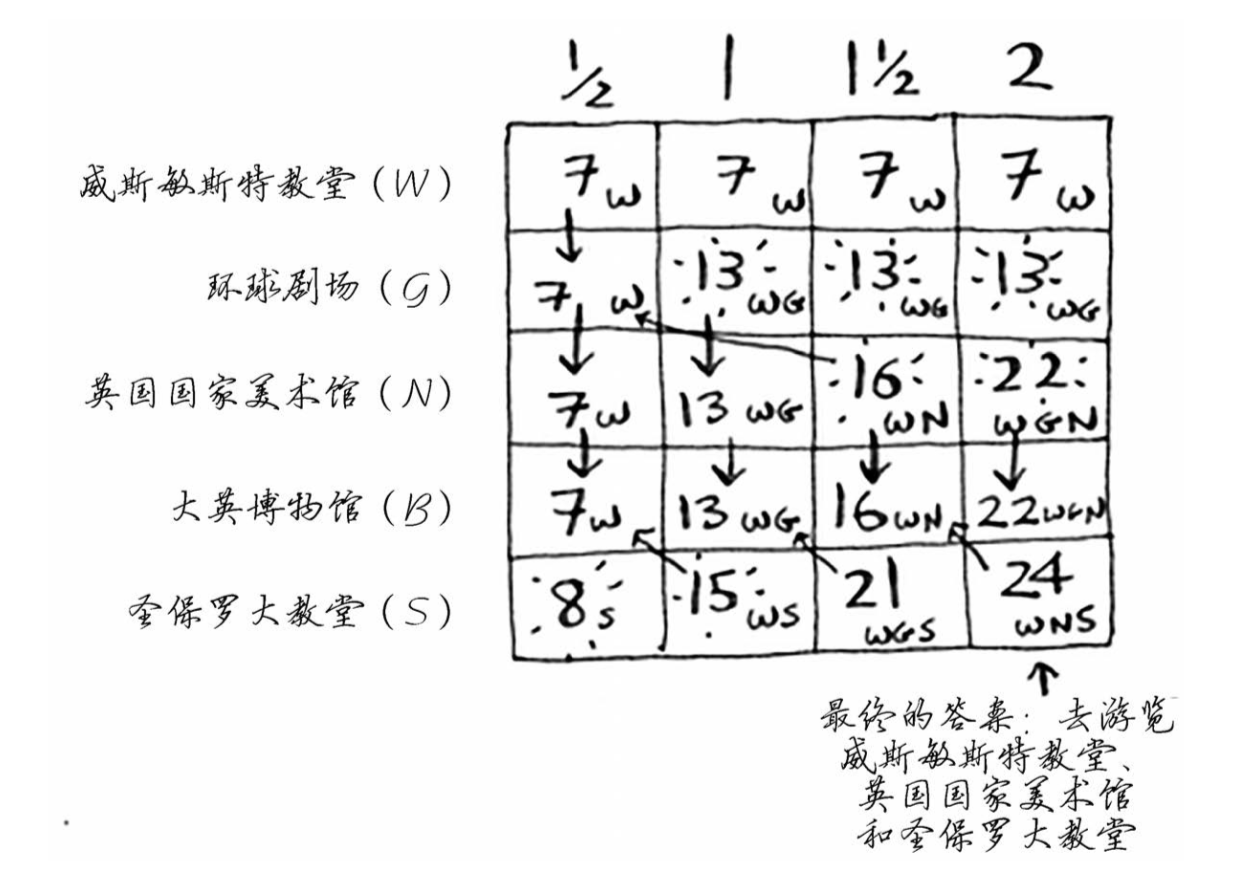
8.动态规划
背包问题
简单算法:尝试各种组合,找出价值最高的组合($2^n$)
动态规划
- 先解决子问题,再逐步解决大问题
- 都从网格开始
- 各行 为可选择的商品
- 各列 为不同容量的背包
吉他行
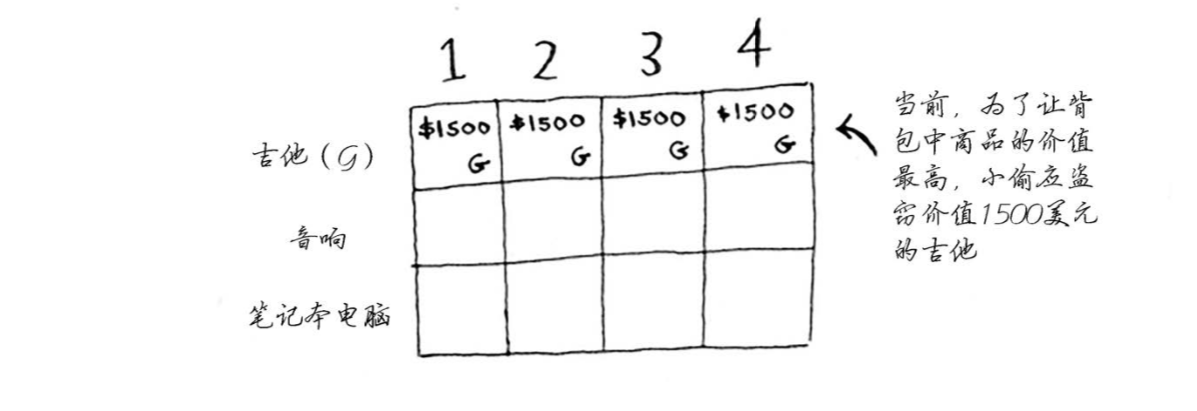
为了让当前的最大价值最大,在只能偷吉他的情况下,在1、2、3、4磅的背包容量单元格只能填¥1500
音响行
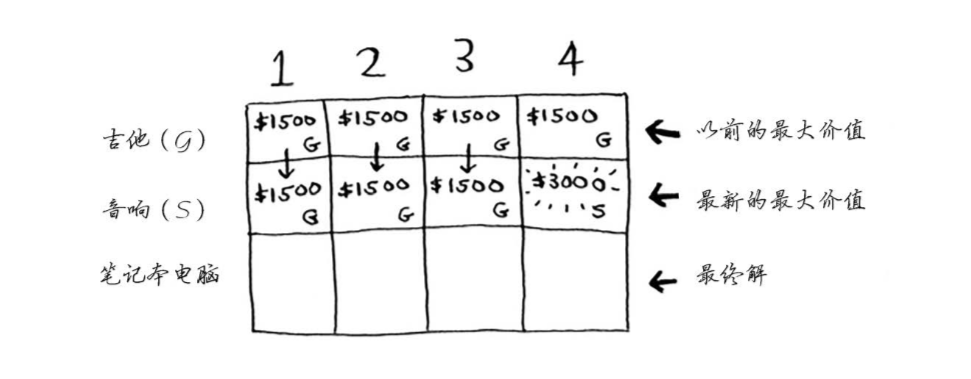
为了让当前的最大价值最大,在只能偷吉他和音响的情况下,在1、2、3磅的背包容量单元格只能填¥1500,因为音响太重了,在4磅的背包单元格终于可以填音响,更新为¥3000
笔记本行
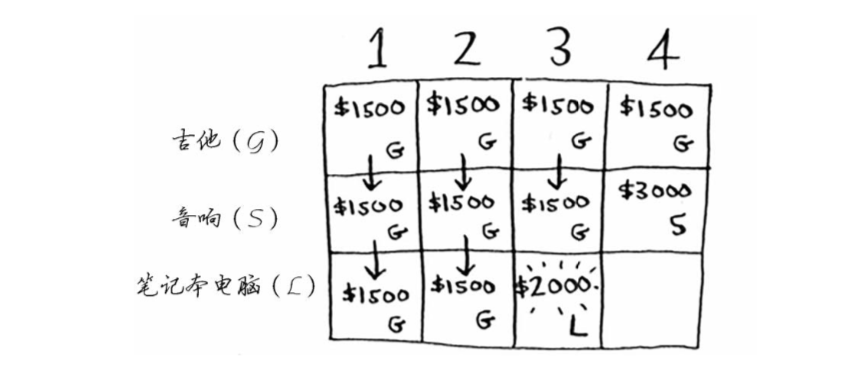
笔记本较重,3磅的背包容量单元格可以装下笔记本,更新为¥2000
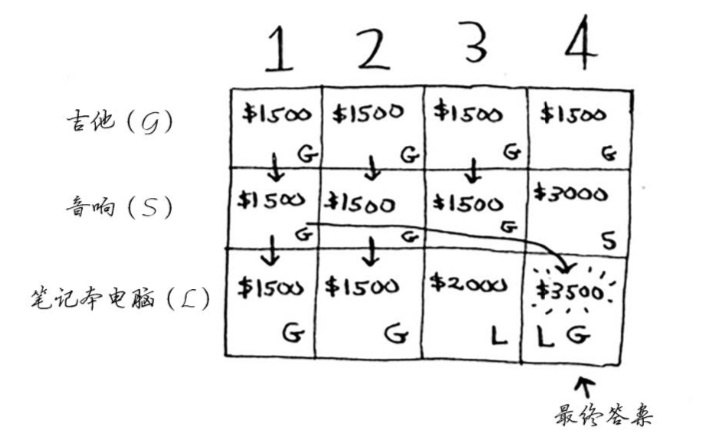
在4磅1的背包容量单元格可以同时装下吉他和笔记本,更新为¥3500
总结
- 沿着一列往下走时,最大价值不可能降低
- 行的排列顺序与结果无关
- 逐行or逐列排序都没有关系
- 增加一件更小的商品会增加颗粒度,必须调整网络
- 不可以偷商品的一部分
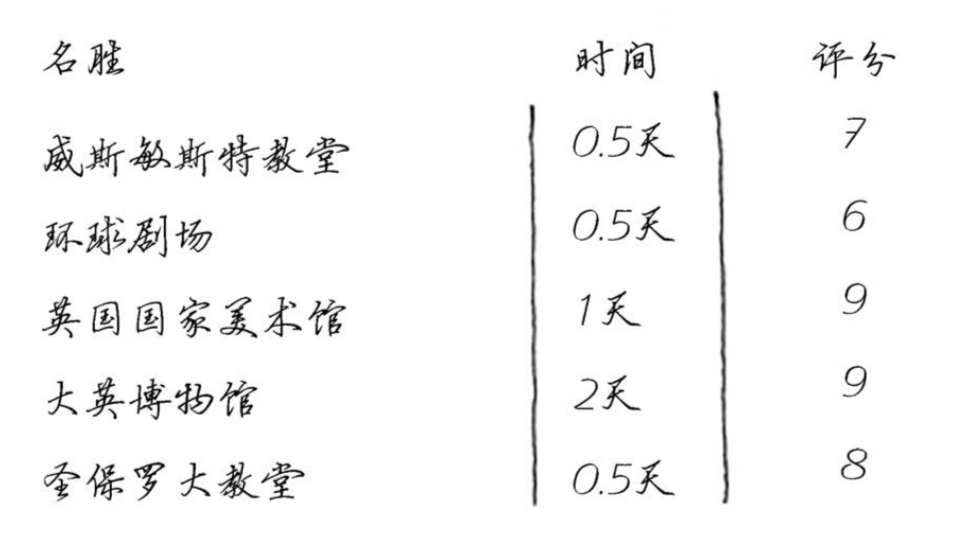
- 旅游行程最优化可以使用背包问题
最长公共子串
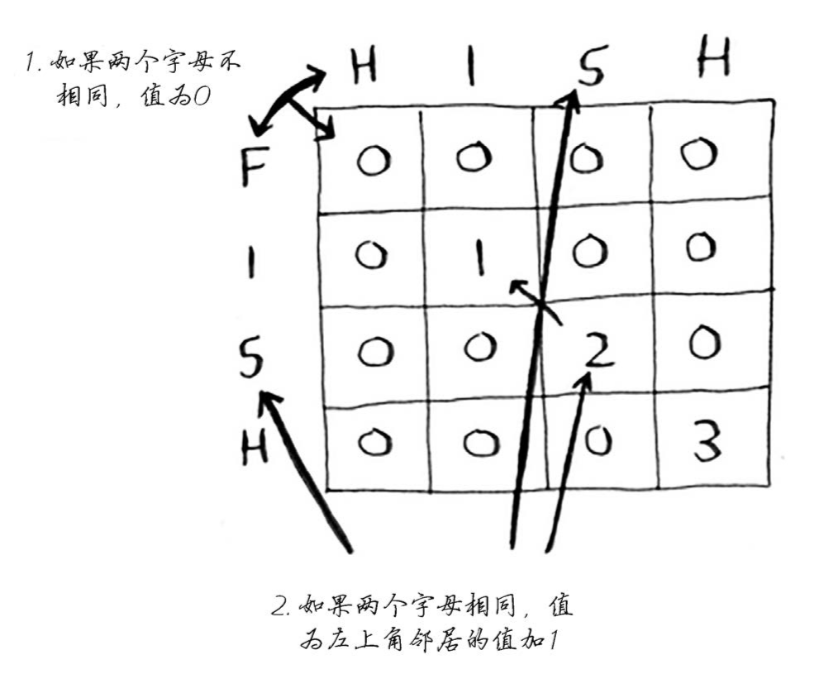
1 | if word_a[i] == word_b[j]: # 如果相同设为左上角+1 |
答案为网格中最大的数字
最长公共子序列
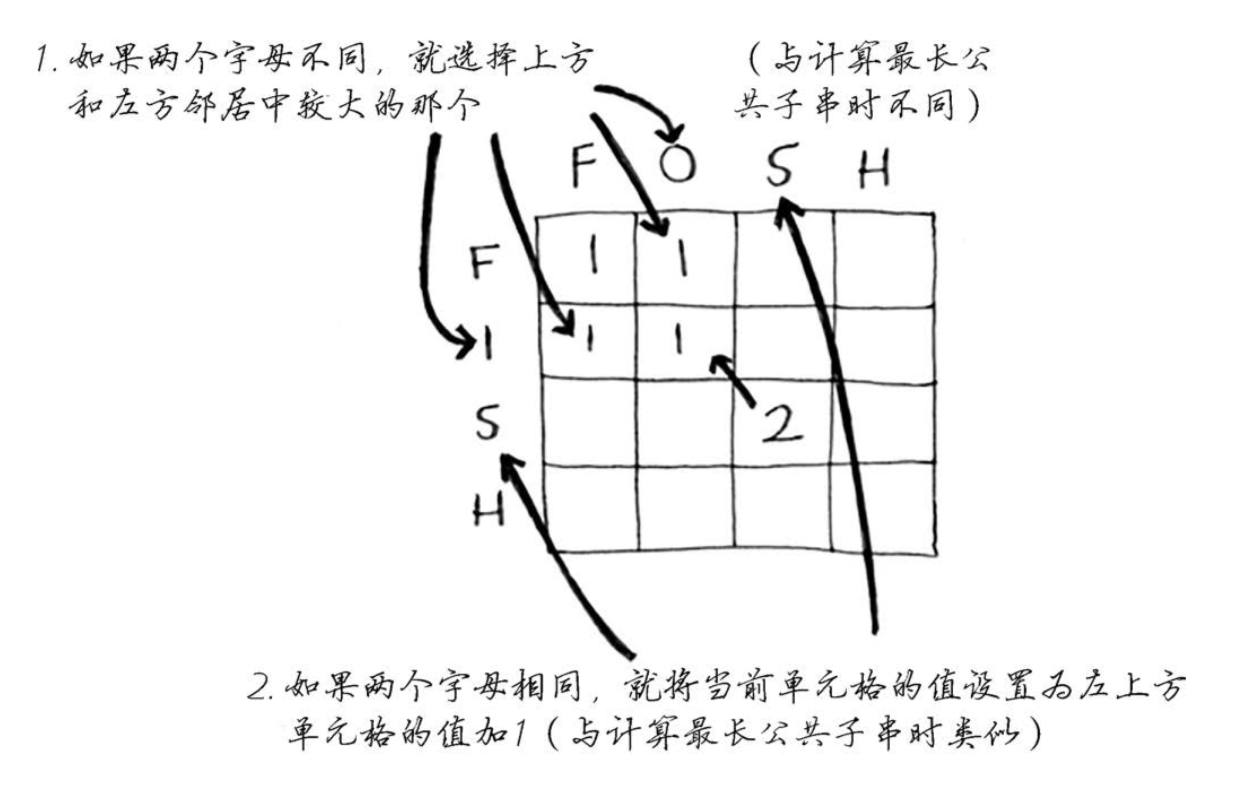
1 | if word_a[i] == word_b[j]: # 如果相同设为左上角+1 |
9.K最近邻算法
k-nearest neighbors, KNN
- 对水果进行分类,比如哈密瓜🍈和西瓜🍉中有一个神秘的水果
- 查看它三个最近的邻居
- 在这些邻居中,哈密瓜🍈数量多于西瓜🍉,因此很可能是哈密瓜
创建推荐系统
特征抽取
计算两点的距离可以用毕达哥斯拉公式
$$
\sqrt{ \left( x_{1}-x_{2}\right) ^{2}+ \left (y_{1}-y_{2}\right)^{2} }
$$
余弦相似度
余弦相似度的取值范围从-1到1:
- 1 表示向量完全相同(指向同一方向)
- 0 表示向量正交(完全不同)
- 1 表示向量完全相反(指向相反方向)
计算公式
对于两个向量 A 和 B,余弦相似度cosine(A,B) 定义为:
$\text{cosine}(\mathbf{A}, \mathbf{B}) = \frac{\mathbf{A} \cdot \mathbf{B}}{|\mathbf{A}| |\mathbf{B}|}$
其中:
- A⋅B 是向量 A 和 B 的点积(内积)
- ∥A∥ 和 ∥B∥ 分别是向量 A 和 B 的欧几里得范数(长度)
$\text{cosine}(\mathbf{A}, \mathbf{B}) = \frac{\sum_{i=1}^{n} a_i \cdot b_i}{\sqrt{\sum_{i=1}^{n} a_i^2} \cdot \sqrt{\sum_{i=1}^{n} b_i^2}}$
实例
假设有两个向量A=[a1,a2,a3]和B=[b1,b2,b3],它们的余弦相似度计算如下:
$\text{cosine}(\mathbf{A}, \mathbf{B}) = \frac{a_1 b_1 + a_2 b_2 + a_3 b_3}{\sqrt{a_1^2 + a_2^2 + a_3^2} \cdot \sqrt{b_1^2 + b_2^2 + b_3^2}}$。
若是评价标准不同呢?
可使用归一化(normalization)。你可计算每位用户的平均评分,并据此来调整用户的评分
回归
就是根据已有数据预测结果(如一个数字)
建议根据sqrt(n)来推荐
机器学习简介
OCR(optical character recognition),光学字符识别
- 浏览大量的数字图像,提取特征(线段、点、曲线等)
- 遇到新图像时,提取该特征并找出最近的邻居都是谁
创建垃圾邮件过滤器
朴素贝叶斯分类器(Naive Bayes classifier)
假设特征之间相互独立
$P(A|B) = \frac{P(B|A) \cdot P(A)}{P(B)}$
$y = \arg\max_{C_i} P(C_i|X) = \arg\max_{C_i} \frac{P(X|C_i) \cdot P(C_i)}{P(X)}$
预测股票情绪
几乎不可能
10.总结
- 第一章
- 二分查找的速度比简单查找快得多
- O(log n)比O(n)快。需要搜索的元素越多,前者比后者就快得越多
- 算法运行时间并不以秒为单位
- 算法运行时间是从其增速的角度度量的
- 算法运行时间用大O表示法表示
- 第二章
- 计算机内存犹如一大堆抽屉
- 需要存储多个元素时,可使用数组或链表
- 数组的元素都在一起
- 链表的元素是分开的,其中每个元素都存储了下一个元素的地址
- 数组的读取速度很快
- 链表的插入和删除速度很快
- 在同一个数组中,所有元素的类型都必须相同(都为int、double等)
- 第三章
- 递归指的是调用自己的函数
- 每个递归函数都有两个条件:基线条件和递归条件
- 栈有两种操作:压入和弹出
- 所有函数调用都进入调用栈
- 调用栈可能很长,这将占用大量的内存
- 每次递归会创建新的栈帧,循环始终使用一个栈帧
- 第四章
- D&C将问题逐步分解。使用D&C处理列表时,基线条件很可能是空数组或只包含一个元素的数组
- 实现快速排序时,请随机地选择用作基准值的元素。快速排序的平均运行时间为O(n logn)
- 大O表示法中的常量有时候事关重大,这就是快速排序比合并排序快的原因所在
- 比较简单查找和二分查找时,常量几乎无关紧要,因为列表很长时,O(log n)的速度比O(n)快得多
- 第五章
- 你可以结合散列函数和数组来创建散列表
- 冲突很糟糕,你应使用可以最大限度减少冲突的散列函数
- 散列表的查找、插入和删除速度都非常快
- 散列表适合用于模拟映射关系
- 一旦填装因子超过0.7,就该调整散列表的长度
- 散列表可用于缓存数据(例如,在Web服务器上)
- 散列表非常适合用于防止重复
- 第六章
- 广度优先搜索指出是否有从A到B的路径
- 如果有,广度优先搜索将找出最短路径
- 面临类似于寻找最短路径的问题时,可尝试使用图来建立模型,再使用广度优先搜索来解决问题
- 有向图中的边为箭头,箭头的方向指定了关系的方向,例如,rama radit表示rama欠adit钱
- 无向图中的边不带箭头,其中的关系是双向的,例如,ross - rachel表示 “ross 与rachel约会,而rachel也与ross约会”
- 队列是先进先出(FIFO)的。
- 栈是后进先出(LIFO)的。
- 你需要按加入顺序检查搜索列表中的人,否则找到的就不是最短路径,因此搜索列表必须是队列
- 对于检查过的人,务必不要再去检查,否则可能导致无限循环
- 第七章
- 广度优先搜索用于在非加权图中查找最短路径
- 迪克斯特拉算法用于在加权图中查找最短路径
- 仅当权重为正时狄克斯特拉算法才管用
- 如果图中包含负权边,请使用贝尔曼-福德算法
- 第八章
- 贪婪算法寻找局部最优解,企图以这种方式获得全局最优解
- 对于NP完全问题,还没有找到快速解决方案
- 面临NP完全问题时,最佳的做法是使用近似算法
- 贪婪算法易于实现、运行速度快,是不错的近似算法
- 第九章
- 需要在给定约束条件下优化某种指标时,动态规划很有用
- 问题可分解为离散子问题时,可使用动态规划来解决
- 每种动态规划解决方案都涉及网格
- 单元格中的值通常就是你要优化的值
- 每个单元格都是一个子问题,因此你需要考虑将问题分解为子问题
- 没有放之四海皆准的计算动态规划解决方案的公式
- 第十章
- KNN用于分类和回归,需要考虑最近的邻居
- 分类就是编组
- 回归就是预测结果(如数字)
- 特征抽取意味着将物品(如水果或用户)转换为一系列可比较的数字
- 能否挑选合适的特征事关KNN算法的成败




